
Robots
Spotmini

SpotMini is a small four-legged robot that comfortably fits in an office or home. It weighs 25 kg (30 kg if you include
the arm). SpotMini is all-electric and can go for about 90 minutes on a charge, depending on what it is doing.
SpotMini is the quietest robot we have built. These sensors help with navigation and mobile manipulation. ...
the development cycle on SpotMini
more information
click here
Atlas

Atlas is the latest in a line of advanced humanoid robots we are developing. Atlas' control system coordinates motions
of the arms, torso and legs to achieve whole-body mobile manipulation, greatly expanding its reach and workspace.
Atlas' ability to balance while performing tasks allows it to work in a large volume while occupying only a small
footprint.
more information
click here
Handle

Handle is a robot that combines the rough-terrain capability of legs with the efficiency of wheels. It uses many
of the same principles for dynamics, balance, and mobile manipulation found in the quadruped and biped robots
we build, but with only 10 actuated joints, it is significantly less complex. Wheels are fast and efficient on
flat surfaces while legs can go almost anywhere: by combining wheels and legs, Handle has the best of both worlds.
more information
click here
Spot

Spot is a four-legged robot designed for indoor and outdoor operation. It has been the breeding ground for a new
approach to dynamic robot control that brings true autonomy within reach. Spot is electrically powered and hydraulically
actuated. It senses its rough-terrain environment using LIDAR and stereo vision in conjunction with a suite of
on-board sensors to maintain balance and negotiate rough terrain.
more information
click here
LS3

LS3 was designed to go anywhere Marines and soldiers go on foot, helping carry their load. LS3 carries 182 kg of
gear and enough fuel for a 32 km mission lasting 24 hours. (In one test on flat terrain LS3 carried over 500 kg of
payload.) LS3 automatically follows its leader using computer vision, so it does not need a dedicated driver. It
also travels to designated locations using terrain sensing, obstacle avoidance and GPS. LS3 was funded by DARPA and
the US Marine Corps. Boston Dynamics assembled an extraordinary team to develop the LS3, including engineers and
scientists from Boston Dynamics, Carnegie Mellon, the Jet Propulsion Laboratory, Bell Helicopter, AAI Corporation,
and Woodward HRT.
more information
click here
Wildcat
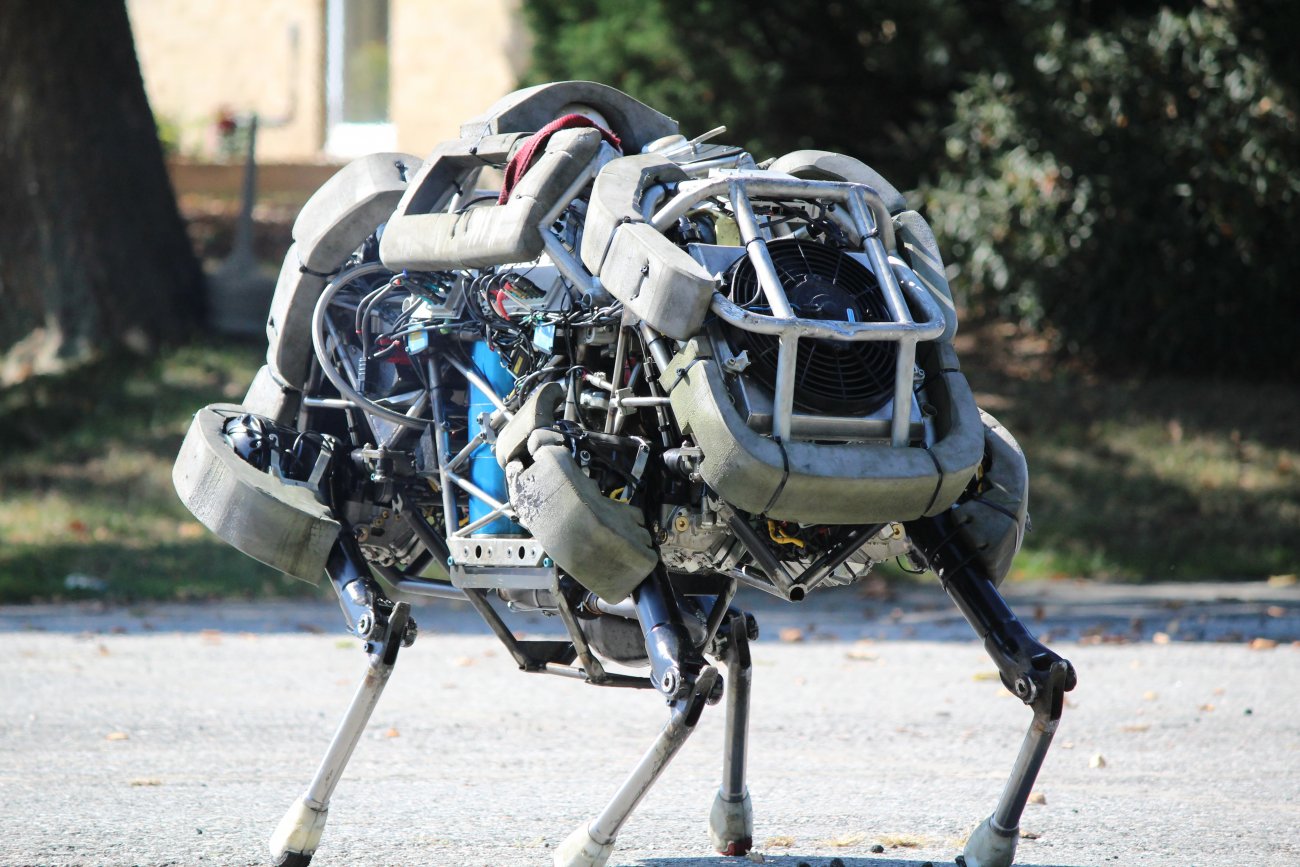
WildCat is powered by a methanol burning engine that drives a hydraulic actuation system (and makes a whale of a
noise.) The robot uses a variety of gaits, including trotting, bounding, and galloping to maintain its balance
while running and maneuvering over relatively flat terrain. The on-board computer uses dynamic control algorithms
and a variety of sensors (IMU, ground contract, proprioception, visual odometry) to control and stabilize the
running motion. It uses a set of laser range finders to accurately measure the robot’s height and attitude above
the ground. The control system that stabilizes WildCat was first developed on Cheetah, a laboratory prototype
that ran 48 km/h, faster than Usain Bolt.WildCat is powered by a methanol burning engine that drives a hydraulic
actuation system
more information
click here
Bigbog

BigDog has four legs that are articulated like an animal’s, with compliant elements to absorb shock and recycle energy
from one step to the next. BigDog is the size of a large dog or small mule. BigDog's on-board computer controls
locomotion, processes sensors, and handles communications with the user. BigDog’s control system keeps it balanced,
manages locomotion on a wide variety of terrain, and does navigation. Sensors for locomotion include joint position,
joint force, ground contact, ground load, a gyroscope, LIDAR, and a stereo vision system. Other sensors focus
on the internal state of BigDog, monitoring the hydraulic pressure, oil temperature, engine functions, battery
charge, and others.
more information
click here
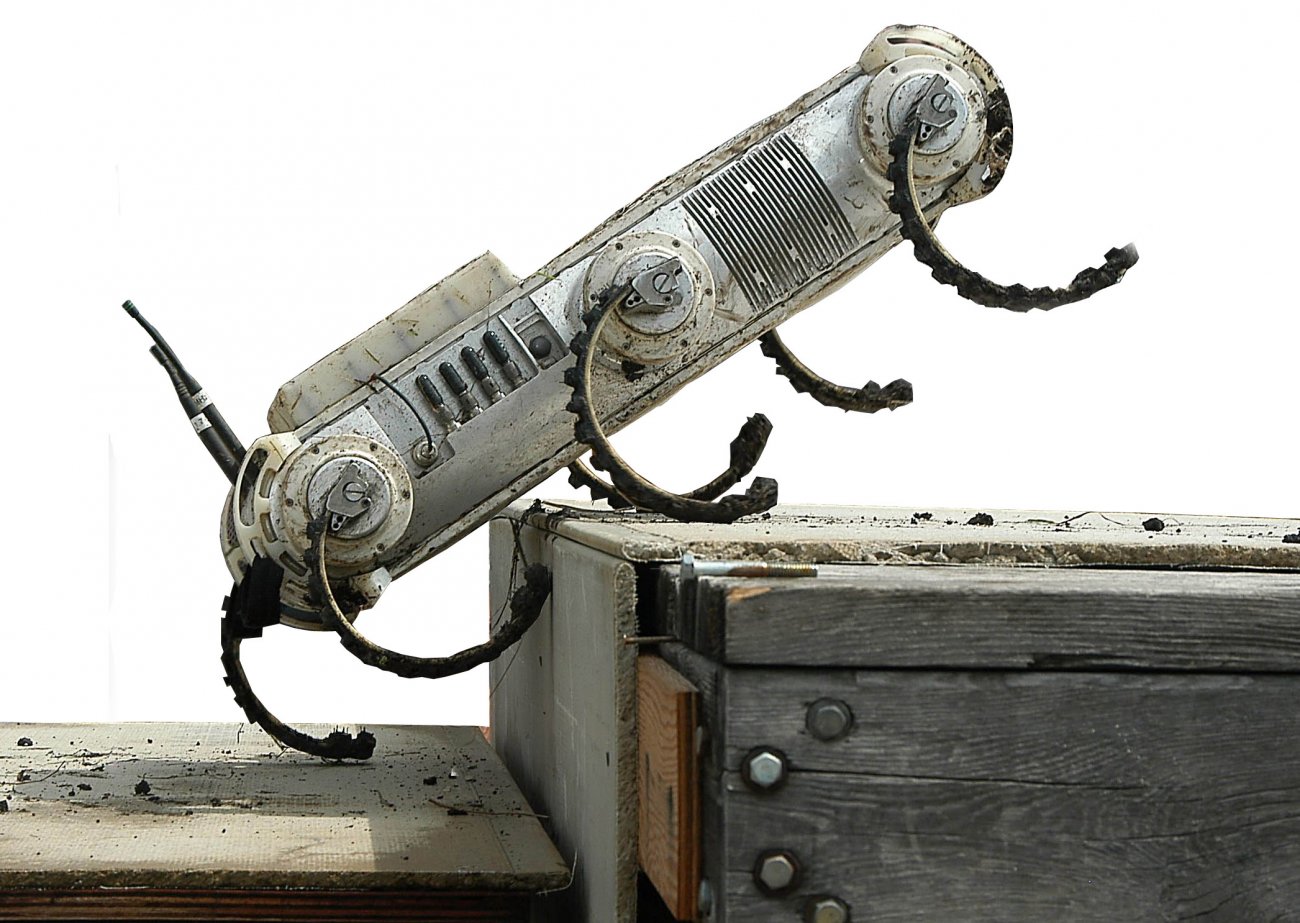
SandFlea

Sand Flea is a small robot with 4 wheels and a mighty jumping leg. It drives like an RC car on flat terrain, but
can jump 10 m into the air to jump over obstacles. That is high enough to jump over a compound wall, onto the
roof of a house, up a set of stairs or into a second story window. The robot uses its wheels as gyros to stay
level during flight so the operator gets a clear view from the on-board camera and to ensure a smooth 4-wheel
landing. Sand Flea can jump about 25 times on one charge. Boston Dynamics developed Sand Flea with funding from
the US Army’s Rapid Equipping Force (REF), DARPA and Sandia National Laboratory.
more information
click here
Rlex
Rhex is a six-legged robot with remarkable mobility on rough terrain. Independently controlled legs produce specialized
gaits that propel it over rough terrain with minimal operator input. RHex traverses rock fields, mud, sand, vegetation,
railroad tracks, telephone poles, and stairways. Front- and rear-facing cameras give the operator a remote view
of RHex's surroundings. Its sealed body makes RHex fully operational in wet weather, muddy and swampy conditions,
and flowing culverts. RHex's remarkable terrain capabilities have been validated in government-run independent
testing. Rhex was developed with funds from DARPA and the US Army Rapid Equipping Force.
more information
click here